
Team Demeter: takana vasemmalta Miika Telama, Jukka Turtiainen ja Jari Kostamo, edessä Pekka Viinanen, Tuomas Virtanen ja Ville Mussalo






Peltorobottien kantavana ideana on ollut rakentaa robotti, joka kykenee liikkumaan itsekseen maissirivien välissä (riviväli 75 cm) ja lisäksi suorittamaan tiettyjä tehtäviä. Robotilla tarkoitetaan nimenomaisesti sitä, että laitteen tulee toimia täysin ilman ihmisen vuorovaikutusta, radio-ohjattavia ym. laitteita ei lasketa roboteiksi.
Maissirivien 75 cm väli rajoittaa robotin fyysistä kokoa, ja vuosien saatossa robottien ulkomittojen leveys on vakiintunut 30–40 cm välille. Tänäkin vuonna kilpailujärjestäjillä oli tarkoitus ajattaa robotteja maissirivien välissä, mutta tällä kertaa nurmelle kylvettynä. Nurmi oli kilpailun tämän vuoden teemana, ehkä osin johtuen samoihin aikoihin samoissa maisemissa järjestetyistä jalkapallon MM-kisoista.
Keski-Euroopan kylmän kevään seurauksena suorakylvönä nurmelle kylvetyt maissit eivät kuitenkaan kasvaneet riittävän suuriksi ja kilpailujärjestäjä oli tehnyt "maissipellon" ohrapellosta siten, että pari viljariviä vastasi yhtä maissiriviä ja niiden välit oli ajettu ruohonleikkurilla auki. Robottien kannalta varasuunnitelmaan turvautuminen ei muuttanut tilannetta merkittävästi, riviväli oli edelleen sama ja kasvustorivit vihreitä.
Kilpailuun osallistuvat robotit ovat rakentaneet pääasiassa yliopisto-opiskelijat, mutta on mukana ollut myös opiskelijoita ammattikorkeakouluun verrattavissa olevista oppilaitoksista.
Peltorobottikilpailun säännöt muuttuvat joka vuosi. Kilpailun 2006 säännöt lyhyesti: Kilpailtiin viidessä eri osiossa. Ensimmäisessä osiossa robottien tuli osata ajaa kohti jalkapallokentän punaista kulmalippua ja piirtää maahan suora viiva. Toisessa osiossa ajettiin "maissien" eli harvennettujen ohrarivien välissä, rivien pituus oli n. 20 metriä ja rivin päässä robotin piti kyetä kääntymään joka toiselle riville automaattisesti. Lisäksi robotin piti laskea rivillä olevien voikukkien määrä (voikukkia simuloitiin keltaisilla golfpalloilla). Kolmannessa tehtävässä robotit ajoivat nopeuskilpailun "maissiriveillä", pudotuspelimenetelmällä, kolme robottia lähti yhtä aikaa vierekkäisiltä riveiltä ja ensimmäisenä rivin päähän edennyt pääsi seuraavalle kierrokselle. Kolmen ensimmäisen tehtävän yhteispisteiden perusteella jaettiin pääpalkinto. Neljäntenä, erillisenä, tehtävänä oli etsiä valkoisella viivalla rajatulta n. 7x5 metrin nurmikolta reikiä. Viimeisenä tehtävänä oli perinteinen freestyle, jossa joukkueet olivat saaneet itse keksiä mitä muuta robotti osaa tai mitä robotti voisi tehdä.
Suomesta kilpailuun osallistui Helsingin Yliopiston agroteknologian opiskeljoiden ja Teknillisen korkeakoulun automaatiotekniikan opiskelijoiden yhteisjoukkue, kuten jo vuonna 2005. Ryhmään kuuluivat automaatiotekniikan opiskelijat Miika Telama (capt), Jukka Turtiainen, Pekka Viinanen ja agroteknologian opiskelijat Jari Kostamo, Ville Mussalo ja Tuomas Virtanen. Työtä ohjasivat yliopistojen puolesta dipl.ins. Timo Oksanen ja MMM Johannes Tiusanen. Ryhmän tavoitteena oli parantaa edellisen vuoden kilpailussa tullutta viidettä sijaa.
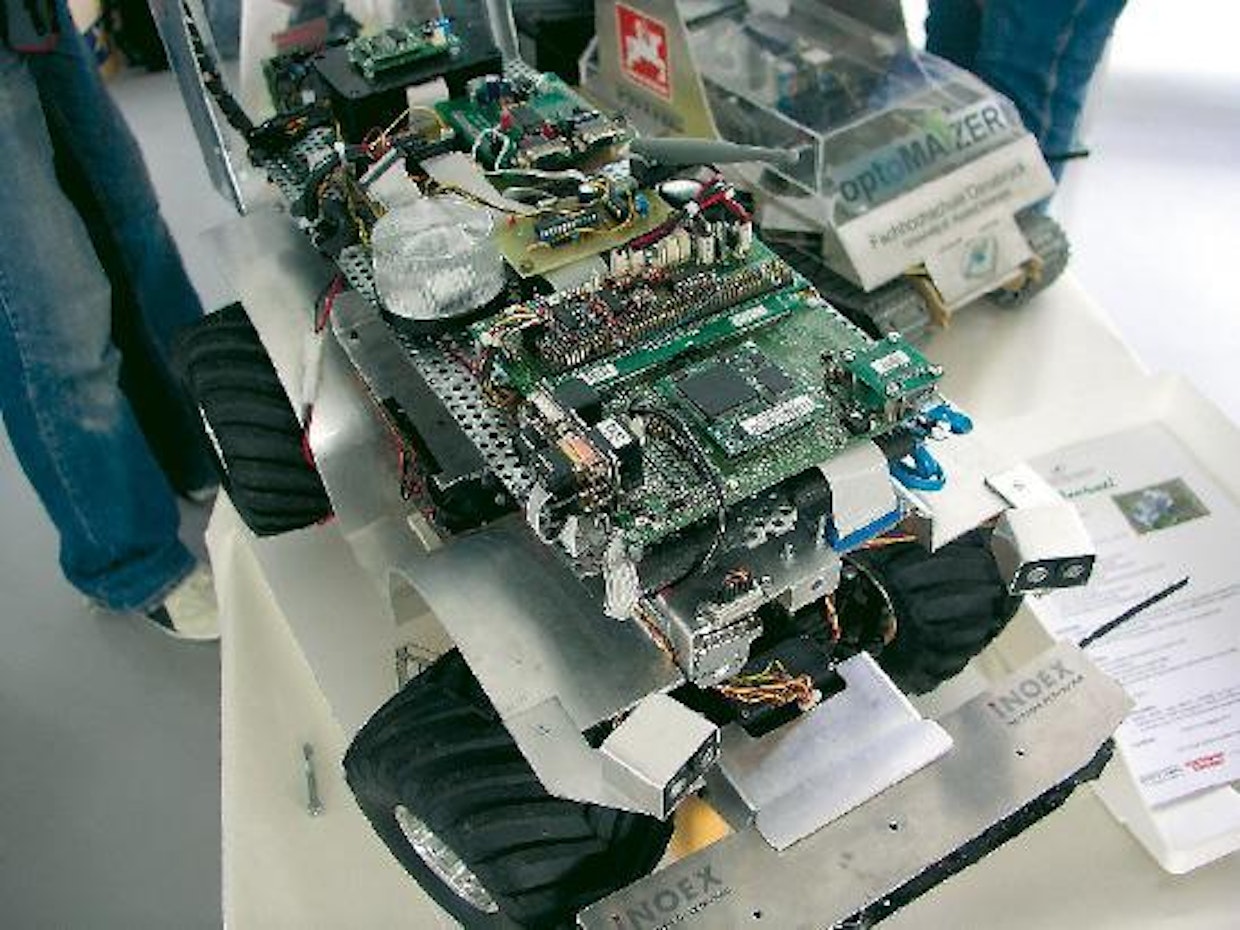
Suomen joukkueen robotin nimeksi päätettiin Demeter, periytyen kreikan mytologiasta. Demeterin suunnittelussa haluttiin tehdä jotain tavanomaisesta poikkeavaa. Erikoisuudeksi ja suunnitelluksi kilpailuvaltiksi päädyttiin tekemään robotista kahteen suuntaan ajettava, jotta rivien päässä ei tarvitsisi kääntää runkoa 180 astetta. Tämän vuoksi robotista piti tehdä mahdollisimman symmetrinen, jotta suuntaa vaihdettaessa ajokäyttäytyminen pysyisi samanlaisena. Demeter on nelivetoinen, nelipyöräohjattu, elektronisesti ohjatuilla sähkömoottoreilla kulkeva pieni robotti. Alarunko on jaettu kahteen osaan, jotka on yhdistetty vapaasti liikkuvalla kiertonivelellä. Ylärunko on kiinnitetty toiseen alarunkoon kiinteästi ja tämä muodostaakin ainoan poikkeuksen symmetrisyyteen, yhtenäinen ylärunko tarvitaan pääasiassa kannettavan tietokoneen kannattimeksi. Runko on pääosin alumiinia ja voimansiirto on toteutettu pääosin TwinForce RC-auton komponenteista, mutta välityksiä on alennettu jotta saavutetaan riittävä vääntö pienillä nopeuksilla.
Robotin antureina on maston päässä oleva webbikamera, mastossa alempana on sähköinen kompassi ja robotin kussakin kulmassa on ultraääneen perustuva etäisyysanturi. Webbikamera on kiinnitetty kääntöpäähän ja ajosuuntaa vaihdettaessa kamera käännetään ajosuuntaan. Ohjauselektroniikassa on kaksi mikrokontrolleria, joista toisella hallitaan sähkömoottorien nopeussäätöä ja etu- ja takapyörien kulmaa ja toisella muunnetaan mittaukset tietokoneelle helpommin luettavaan muotoon. Pääasiallinen "äly" on toteutettu kannettavaan tietokoneeseen, joka sijaitsee ylärungon päällä.
Maissiriveillä ajettaessa webbikameran kuvasta erotetaan vihreät rivit ja lasketaan missä asennossa robotti on riviin nähden, vastaava tieto saadaan myös neljältä ultraäänietäisyysanturilta. Molemmista saadaan myös arvio siitä onko rivi lopussa. Yhdistämällä kahdesta lähteestä tuleva informaatio saadaan lisää luotettavuutta ja tarkkuutta. Säädin ohjaa mittaustiedon perusteella etu- ja takapyörien kulmia siten että robotti kulkisi maissirivien puolessavälissä, rivien suuntaisessa asennossa. Päistekäännöksessä seuraavalle (tai sitä seuraavalle) riville mennään ensin rapuohjauksella toiseen suuntaan, vaihdetaan ajosuuntaa ja sitten rapuohjauksella vastakkaiseen suuntaan, suunnassa pysymistä auttaa sähköinen kompassi. Rungon asento pysyy koko käännöksen samana.
Freestyle-osioon suomalaisjoukkue oli ideoinut ja toteuttanut mittausperävaunun, jolla robotti voisi pellolla tutkia maan ominaisuuksia. Perävaunussa on pystyyn asennettu sähkösylinteri, jonka alapäähän on asennettu kaksi kartiomaista piikkiä. Sylinterillä maahan painettaessa eri maalajit aiheuttavat kartioon hieman eri voiman ja mittausperävaunulla mitataan tätä vastustavaa voimaa. Toiseksi piikit on eristetty toisistaan sähköisesti ja syöttämällä piikkeihin eri jännite ja mittaamalla virtaa saadaan maan sähkönjohtavuus, joka korreloi mm. kosteuteen.
Aiempiin robottikilpailuihin verrattuna tämän vuoden robotit olivat keskenään enemmän samannäköisiä kuin aiemmin. Aiemmin mukana on ollut mukana mm. ilmatyynyalus, polttomoottorikäyttöisiä autoja, telakoneita ja isoja 80 kg:n robotteja. Tänä vuonna kaikki robotit olivat painoluokassa 5–15 kg, kooltaan 30–40 cm leveitä ja sähkökäyttöisiä, joista vain yksi oli telavetoinen. Anturoinnin osalta sen sijaan vaihtelua oli melko paljon, samoin prosessorivalinnoissa.
Kilpailun sääntöjä lukiessa tulee väistämättä mieleen, että robotissa tarvitaan jonkinlainen kamera, jotta robotin sijainti kulmalippuun voidaan mitata, samoin keltaisten "voikukkien" tunnistaminen ei onnistu luotettavasti muuten kuin kameralla. Kun kamera yhdistetään prosessoriin ja prosessorissa ajettavalla ohjelmalla pyritään tunnistamaan kuvasta jotain hyödyllistä, puhutaan konenäköjärjestelmästä. Konenäköjärjestelmän tekeminen asetti hieman suuremmat vaatimukset roboteille ja niiden tekijöille kuin aiempina kilpailuvuosina. Useimmat robottijoukkueet olivat päätyneet käyttämään melko halpaa instrumenttia, jossa samaan pakettiin on laitettu kamera ja pieni prosessori ja jolle voi ohjelmoida hyvin yksinkertaisia konenäkötehtäviä, kuten mm. punaisen värin erottaminen ja sen painopisteen laskenta. Tällöin robotin ohjausalgoritmi oli mahdollista toteuttaa toiselle mikrokontrollerille ja fyysisestä toteutuksesta tuli melko kompakti. Muutamat joukkueet, mukaanlukien Demeter, olivat käyttäneet erillistä kameraa ja prosessointi tehtiin jonkinlaisessa PC-koneessa. Demeterissä prosessointi tapahtuu kannettavassa tietokoneessa robotin kyydissä, mutta eräs joukkue oli toteuttanut laskennan robotin ulkopuolella paikallaan olevassa tietokoneessa langattoman tiedonsiirron avulla. Tehokkaampi prosessori mahdollistaa monipuolisemmat algoritmit ja siten mahdollistaa paremman mittauksen. Vaihtelevissa olosuhteissa toimivan konenäköalgoritmin kehittäminen on edelleen yleisessä tapauksessa hyvin vaikea tehtävä ja tässä suhteessa tämän kilpailun robottien rakentajat olivat kohtuullisen hyvin onnistuneet kehitystyössään.
Kilpailutapahtuma itsessään oli yksipäiväinen, kuhunkin kilpailun osa-alueeseen oli varattu n. tunti. Ensimmäiseksi käydyssä kulmalipulleajokisassa vain kaksi robottia osasi ajaa lipulle ja pysähtyi sääntöjen määräämällä tavalla automaattisesti. Oletettavasti monella joukkueella vaihtelevat valaistusolosuhteet sekoittivat konenäköjärjestelmän viritysparametrit ja yhdessä valaistuksessa toiminut systeemi ei toiminutkaan enää kilpailutilanteessa (punainen olikin esim. oranssi kameran mielestä).
Rivien välissä ajon voittanut robotti oli nopeudeltaan ylitse muiden. Rivillä pysymisessä oli monella ongelmia eikä myöskään käännöksen tekeminen onnistunut kaikilta automaattisesti. Robottien piti samalla laskea myös rivin sivussa olevien "voikukkien" määrää ja tämän suurin osa roboteista osasi tehdä hyvin. Nopeuskilpailussa voittanut robotti oli selkeästi paras, tämä oli nähtävissä jo edellisessä osiossa.
Demeterissä ilmeni kilpailutilanteessa suuria teknisiä ongelmia. Kulmalipulle ajossa ohjelmistoon oli tullut viimehetken parannusten takia ohjelmavirhe, jonka seurauksena robotti ei nähnyt lippua ja robotti ajoi vain suoraan, ja siten lipun ohi. Aamun harjoituksissa kaikki oli toiminut vielä loistavasti, mutta viimehetken parannukset johtivatkin sitten katastrofiin. Maissiriveillä ajoon ohjelmisto saatiin kuntoon, ja robotti suoriutuikin tehtävästä tyydyttävästi. Tosin ensimmäistä riviä ajettaessa robotti luuli kesken kaiken että rivi on päättynyt ja alkoi tehdä ylimääräistä käännöstä. Tämän seurauksena kääntämiseen liittyvä logiikka meni sekaisin (joka toinen käännös oikealle ja joka toinen vasemmalle), ja seuraavissa päisteissä robotti käänsi aina väärään suuntaan; ja tästä tuomarit sakottivat ankarasti. Voikukkien laskentaan auringonvalossa viritetty konenäköalgoritmi ei sitten toiminutkaan auringon mentyä varjoon ja robotti luuli löytäneensä 523 voikukkaa, kun niitä oikeasti oli 10. (kommentti: tunnistamisen haastavuuden tietäessäni täytyy vaan ihmetellä, miten muut robotit pystyivät "näkemään" voikukat samanvärisestä maastosta vaihtelevassa valaistuksessa hämmästyttävällä parin pallon tarkkuudella...) Nopeuskilpailussa Demeter sijoittui alkuerässä toiseksi (koko osion voittaja osui samaan alkuerään) ja B-finaalissa robotti jäi viivalle akun tyhjennyttyä – tässä osiossa lopputulos 7. Kokonaiskilpailussa Demeterin loppusijoitus oli vaatimaton 11/12.
Kokonaiskilpailun voitti Maizerati (Osnabruck/Saksa), jonka eteen oli selkeästi tehty paljon työtä; koko robotti oli mm. suunniteltu ja mallinnettu CAD:llä yksityiskohtia myöden ja robotin toiminnan testausta varten oli toteutettu 3D-simulointimalli, jossa robotti kulki virtuaalisella maissipellolla rivien välissä; ja virtuaalisella jalkapallokentällä kohti punaista kulmalippua jättäen valkoista viivaa. Simulaattorista on huomattavaa hyötyä ennenkaikkea navigointialgoritmien virityksessä, tämä havaittiin myös Demeter-robotin kehitysprosessissa.
Nurmikolta reiän etsimisessä mikään robotti ei löytänyt merkitylle alueelle tehtyä, yhtä 10x10 cm reikää. Kaikilla roboteilla oli vaikeuksia navigoida alueella, koska roboteissa ei ollut paikannuslaitetta, eikä nurmea reunustanut muu kuin haaleahko kalkkiviiva. Tyylipisteitä tuomarit kuitenkin antoivat vaihtelevasti. Freestyle-osiossa voiton vei malesialaisjoukkue, joka tunnisti konenäöllä maissintaimen ruohikolta ja ruiskutti täsmäruiskutuksena sen päälle vettä (rikkakasvien täsmämyrkyttäjä); toiseksi sijoittui hollantilainen (ammattilais)joukkue joka tunnisti vihreältä nurmikolta suurilehtisen vihreän rikkakasvin ja tuhosi sen luomutyyliin kairalla. Muita freestylen aiheita olivat mm. Chilen lipun seuraaminen ja ruukkukasvien kastelu pissapojalla. Kirjoittaja ei ymmärtänyt ihan kaikkien robottien tekemisiä kielimuurin takia.
Saksalaiset kilpailujärjestäjät ja saksalais-hollantilainen tuomaristo eivät olleet erityisen vieraskoreita kilpailutilanteessa. Huolimatta Chilestä, Malesiasta, Suomesta ja Hollannissa tulleista kilpailujoukkueista isännät päättivät selostaa kilpailun paikallisella kielellä ja tuomariston toiminnassa oli havaittavissa tiettyä linjattomuutta. Mutta tästäkin huolimatta myös ensi kesänä on tarkoitus osallistua suomalaisvoimin vastaavaan kilpailuun Hollannissa.
Kiitokset kilpailuun osallistumisen mahdollistaneille sponsoreille: Henry Fordin säätiö, HP, Koneviesti, Linak, ja OEM Finland. Lisätietoa kilpailusta mm.
http://www.fieldrobot.com/