Field Robot Event 2015: Peltorobottikisat Sloveniassa
Eurooppalaisten yliopistojen opiskelijajoukkueiden rakentamien peltorobottien formulakisat käytiin tänä kesänä Sloveniassa Mariborin yliopiston pihalle perustetulla maissipellolla. Maissintaimet oli istutettu yliopiston nurmikolle, joten kisapelto oli kauttaaltaan vihreä. Konenäölle haastavaa ympäristöä kompensoi tasaisuus eli heikommallakin robotin alustaratkaisulla pystyi liikkumaan.
GroundBreaker-joukkue, vasemmalta: Jussi Linko, Juho Kalliomäki, Tuomas Ruotsalainen, Kimmo Kankare, Jaakko Laine, Teemu Koitto, Juuso Autiosalo ja Eemeli Saarelma. Kuvasta puuttuu Alexander Brink sekä ohjaajat Timo Oksanen ja Jari Kostamo. Kuva: Timo Oksanen
Kisatehtävät muodostuivat kolmesta osiosta, joilla mitattiin robottien suorituskykyä. Ensimmäisessä navigointitehtävässä robotin piti ajaa täysin itsenäisesti ilman kauko-ohjausta mutkikkaita rivejä pitkin, ja kolmen minuutin aikana kuljettu matka mitattiin. Toisessa navigointitehtävässä ympäristö oli haastavampi esteiden ja puuttuvien kasvien vuoksi.
Kolmannessa tehtävässä robotin tehtävänä oli navigoinnin lisäksi kartoittaa ruskeaksi muuttuneet kuolleet kasvit ja piirtää peltoalueesta täsmäkartta ilman GPS-paikannusta. Edellisten lisäksi freestyle-tehtävässä joukkueet saivat esitellä, mitä muuta robotti osaa tehdä. Tuomariston arvostelu perustui agronomiasta vaikuttavuuteen, teknologiseen haastetasoon ja suorituspisteisiin.
Suomesta yksi joukkue
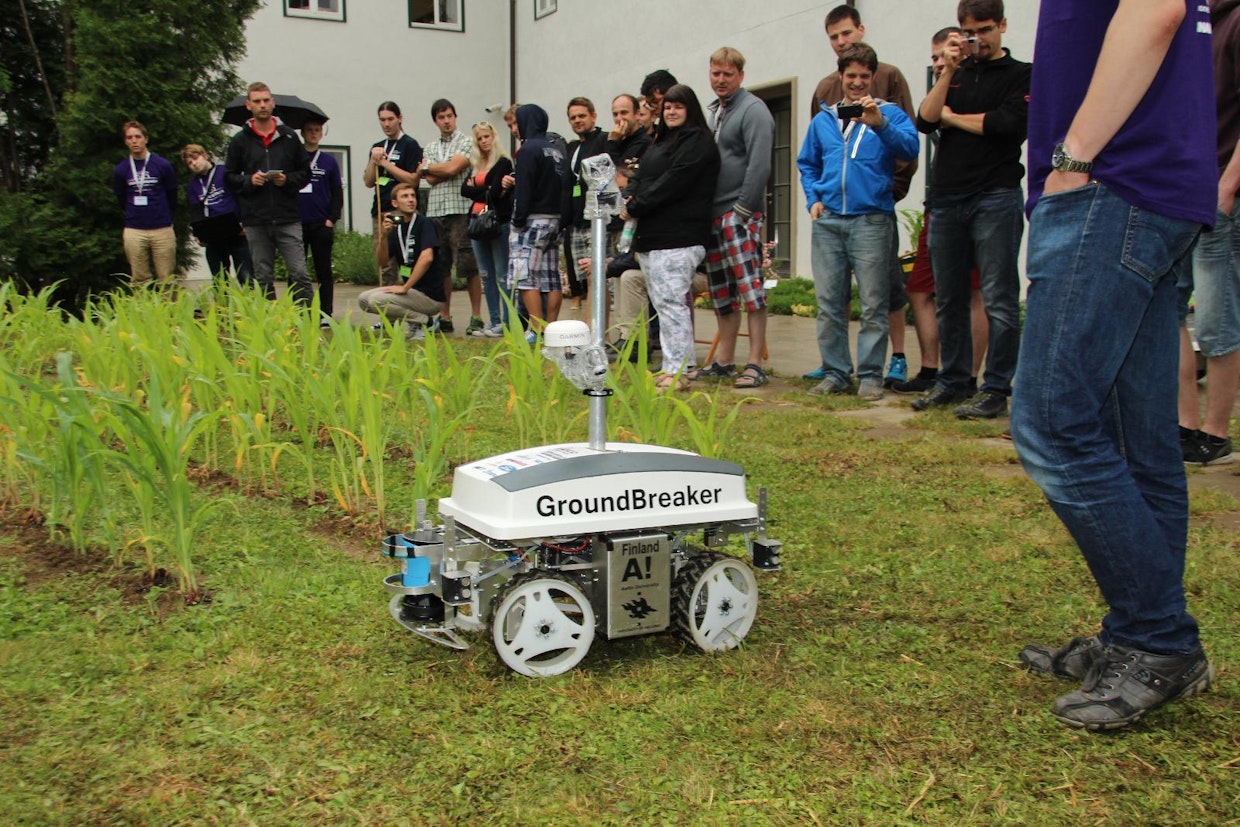
Aalto-yliopiston ja Helsingin yliopiston yhteinen yhdeksänhenkinen joukkue aloitti uuden robotin suunnittelun jo edellisen vuoden syksyllä, ja robotti valmistui kisakuntoon muutamaa viikkoa ennen kilpailua.
GroundBreaker-nimen saaneen robotin alustaratkaisu perustuu sähköiseen voimansiirtoon, nelivetoon, nelipyöräohjaukseen ja tasapainotusmekanismilla varustettuun jousitusratkaisuun. Robotin paino oli noin 20 kiloa. Litiumakkuihin saadaan pakattua kerralla 15Ah/12V, jolla robotin anturit ja tietokoneet pyörivät noin tunnin. Aktiivista ajoaikaa on reilu puoli tuntia.
Robotin kuorien alla on kaksi minitietokonetta, joista paikannustietokone arvioi laserskannerin, etäisyysanturien, gyroskoopin ja kameroiden anturitietojen perusteella robotin sijaintia pellolla. Navigointitietokone ohjaa näiden tietojen perusteella robotin toimilaitteita, kuten pyörien ohjausta ja ajoa. Tämän lisäksi opiskelijat rakensivat omaa elektroniikkaa, jossa toimintoja ohjaa mikrokontrolleri ja siihen tehty ohjelmisto.
GroundBreaker-robotti valmistui liikkumiskuntoon vasta pari viikkoa ennen kilpailuun lähtöä, joten aikaa robotin virittämiseen kisakuntoon ei juurikaan ollut. Kisapaikalla robotin navigointiin liittyvät parametrit kuitenkin saatiin sen verran kohdilleen, että robotti ei saanut juuri lainkaan sakkopisteitä eksymisestä maissien joukkoon. Ajonopeus jäi kuitenkin vaatimattomaksi. Kilpailun pistelasku suosi enemmän nopeaa ja riskialttiiksi viritettyä robottia, joten hidas ja varma ajo ei tuonut perustehtävissä palkintosijoja.
Freestyle-tehtävässä menestystä
Joukkueiden innovatiivisuutta mit- taavan freestyle-tehtävän Ground- Breaker kuitenkin voitti maaperää mittavalla perävaunulla ja onnistuneella demonstraatiolla. Perävaunussa on ketjukaivurin kaltainen laite, jolla kerätään maanäytteitä kärryssä olevaan automaattiseen näyteastiakaruselliin. Edellisen lisäksi vaunu mittaa samalla maaperän kovuutta itse valmistetulla tunkeumapaineanturilla eli penetrometrillä.
Tieto visualisoitiin yleisölle käyt- täen tablet-tietokonetta. Perävaunussa oli myös ominaisuutena painonsiirto robotista, jotta penetrometrin päälle saatiin riittävästi painoa. Pysähtyäkseen demonstraatiossa oikeaan paikkaan perävaunussa oli konenäköjärjestelmä tunnistamassa erivärisiä merkkipalloja koeruudun vieressä. Tämän perusteella kärry komensi robotin ajoa käyttäen ISOBUS-protokollaa.
Kilpailun voitti Siegenin yliopiston joukkue toista kertaa peräkkäin Zephyr-robotillaan. Toiseksi sijoittui Prahan yliopiston Eduro ja kolmanneksi Tanskan teknillisen yliopiston DTUni-corn. Suomen joukkue sijoittui kokonaiskilpailussa kahdeksanneksi. Yhteensä joukkueita osallistui 18, kaukaisimmat saapuivat Turkista, Romaniasta, Suomesta ja Englannista asti.
Videoita peltorobottikilpailusta voi katsoa Youtubesta hakemalla ”Field Robot Event 2015”.
GroundBreaker-joukkuetta tu kivat AGCO/Valtra, Junkkari, Suo- nentieto, Koneviesti, SICK, Linak, Laserle, Maatalouskoneiden Tutkimussäätiö ja Henry Fordin säätiö.
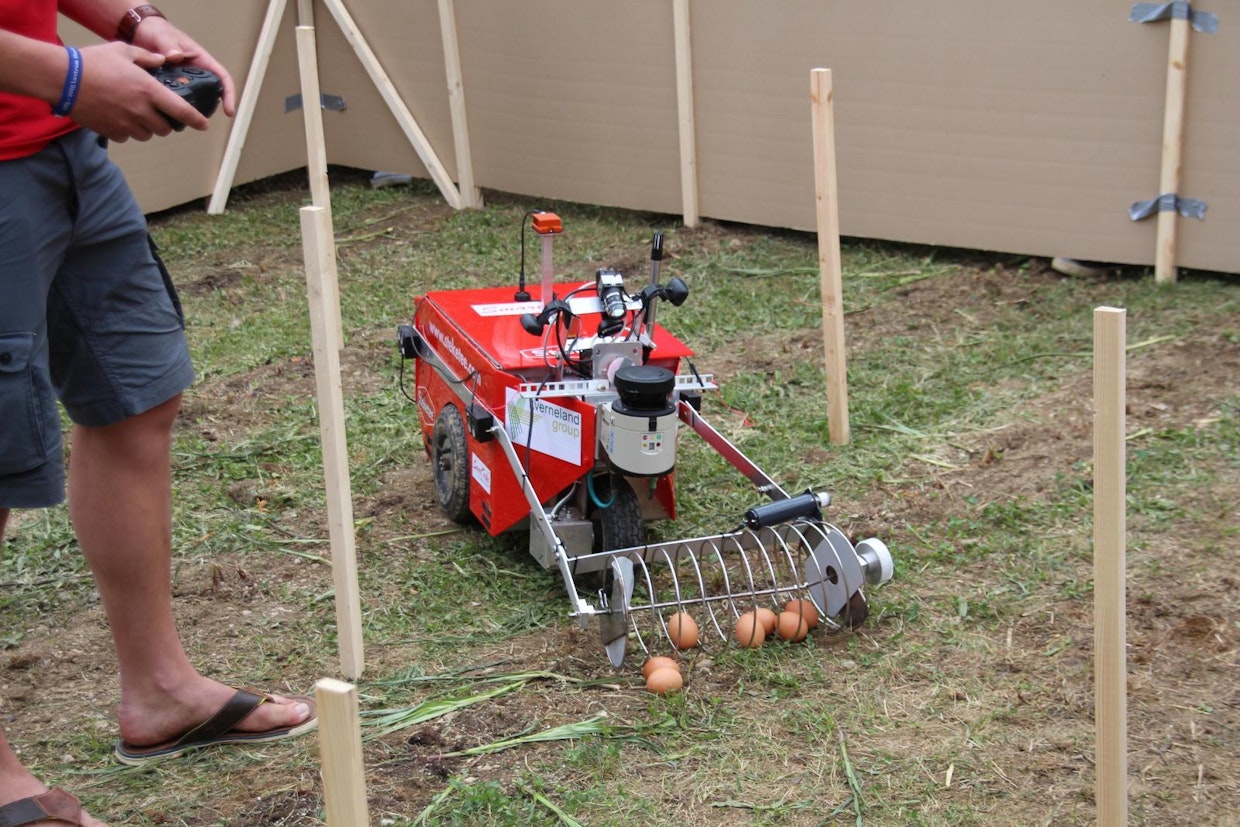
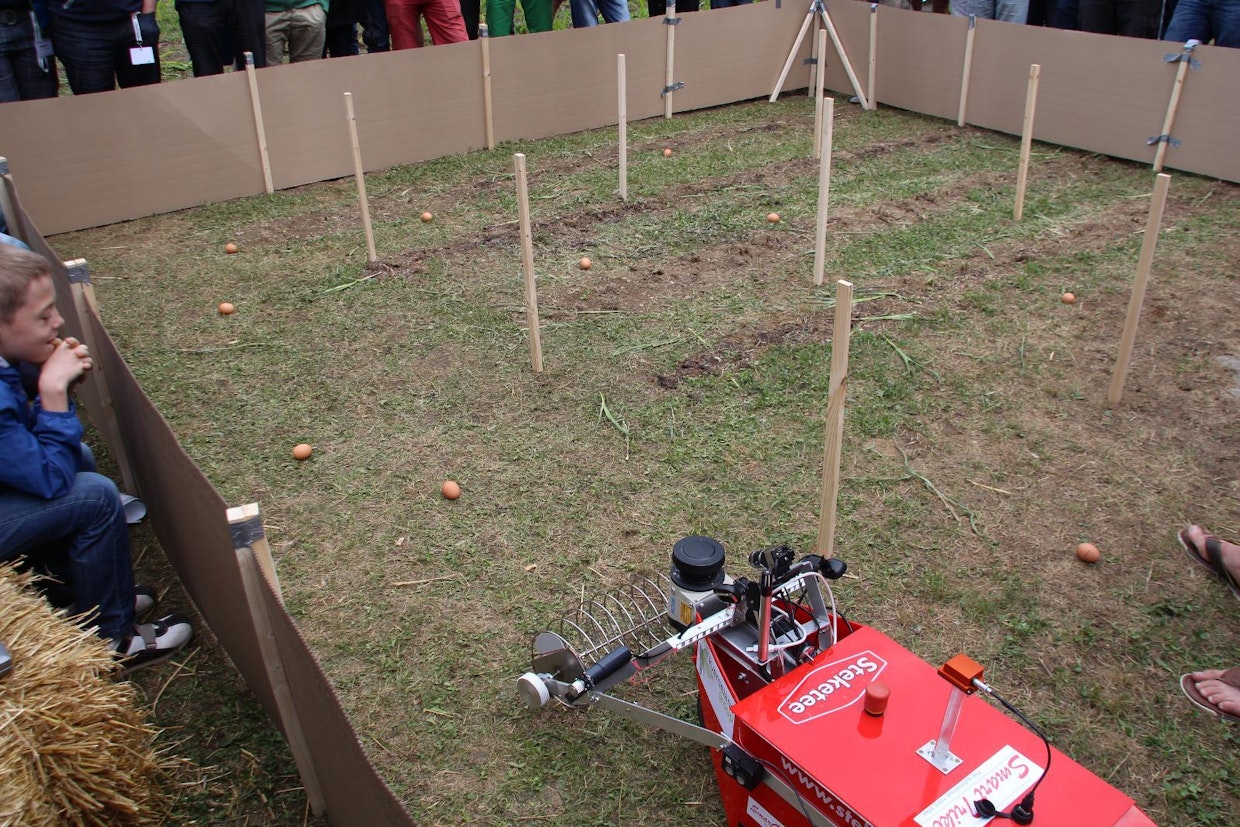
Hollantilaisjoukkue esitteli freestyle- tehtävässä kananmunien keräämistä lattiakanalasta robotin avulla. Hyvistä ideapisteistä huolimatta joukkue sai vähän suorituspisteitä, koska autonominen ajo ei ollut valmistunut kisaan mennessä, loppusijoitus kolmas.
Hollantilaisjoukkue esitteli freestyle- tehtävässä kananmunien keräämistä lattiakanalasta robotin avulla. Hyvistä ideapisteistä huolimatta joukkue sai vähän suorituspisteitä, koska autonominen ajo ei ollut valmistunut kisaan mennessä, loppusijoitus kolmas.
Freestyle-tehtävässä Cornholio sijoittui toiseksi demonstraatiollaan tihkukasteluletkun levittäminen pellolle.
Freestyle-tehtävän voittanut suomalainen GroundBreaker-joukkue rakensi tehtävää varten robottiin älykkään maaperää mittaavan perävaunun. Maanäytteitä keräävän ketjukaivurin lisäksi vaunun alla on penetrometri. Perävaunu kommunikoi päärobotin kanssa käyttäen ISOBUS-protokollaa. Värilliset pallot auttavat robottia demotilanteessa pysähtymään automaattisesti oikeaan kohtaan.
Kokonaiskilpailun voitti toista kertaa peräkkäin Siegenin yliopiston joukkue. Ketterä, nopea ja tarkasti navigoiva robotti oli ylivoimainen ensimmäisessä tehtävässä.
Suomen joukkueen rakentaman GroundBreaker-robotin monipuolinen jousitusratkaisu oli suunniteltu huomattavasti kisaolosuhteita haastavampiin maastoihin. Tällä kertaa tasainen nurmikko ei tehnyt eroja robottien suorituskykyyn.
Saksalaisessa Cornholio-robotissa on tavallisten kameroiden lisäksi kaksi etäisyyskameraa, jotka eivät perinteiseen tapaan mittaa heijastuvan valon määrää ja väriä, vaan etäisyyttä kuvausalueella oleviin kohteisiin.
Hollantilaisessa SmartTrike-robotissa oli neljä kameraa, laserskanneri ja runsaasti muitakin antureita. Liikkuminen tasaisella nurmikolla onnistui hyvin kolmipyörävedolla.