
Joukkue ja robotti palkintoineen. Vasemmalta: Vesa Poutiainen, Petro Tamminen, Heikki Hyyti, Jari Kostamo, Heikki Väätäinen, takana Juha Backman, Jouko Kalmari ja edessä Antti Hakala ja Timo Oksanen.







Suomalaisjoukkue putsasi palkintopöydän Saksan Osnabrückissa käydyssä peltorobottikilpailussa: kuudesta mahdollisesta palkinnosta kaikki matkasivat Suomeen. Joukkueen robotti vakuutti tuomarit luotettavuudellaan.
Timo Oksanen
Järjestyksessään jo kuudes vuosittain järjestettävä peltorobottikilpailu käytiin Saksan Osnabrückissa 12.–14. kesäkuuta 2008. Isäntänä toimi Fachhochschule Osnabrück eli paikallinen ammattikorkeakoulu, jonka robotit ovat menestyneet aikaisemmissa kisoissa.
Kisat järjestetään joka toinen vuosi Hollannin Wageningenissa, josta kilpailu on saanut alkunsa ja joka toinen vuosi jossain muualla. Kilpailuun on osallistunut joukkueita Yhdysvalloista, Malesiasta, Chilestä ja Japanista, mutta tällä kertaa kaikki osallistujat olivat Euroopasta.
Kilpailuun oli ilmoittautunut 17 joukkuetta, mutta kaikki eivät osallistuneet kaikkiin kilpailuosioihin. Kokonaiskilpailun osioihin osallistui 9 joukkuetta robotteineen.
Kilpailu käydään maissipellolla. Joukkueiden tehtävänä on rakentaa robotti, joka liikkuu itsenäisesti maissirivien välissä ja kääntyy rivin lopussa seuraavalle. Robotin tulee olla täysin autonominen eli radio-ohjattavat laitteet ovat kiellettyjä.
Maissirivien väli on 75 cm, mikä on tähän asti rajoittanut robottien kokoa. Ensi vuoden kilpailuun saa osallistua myös rivin yli toimivilla roboteilla. Nähtäväksi jää miten säännöt mukautuvat tähän.
Kilpailutehtäviä oli viisi: perusnavigointi, vaativa navigointi, rikkojen torjunta, erittäin haastava pelto ja freestyle. Kokonaiskilpailun voittaja määräytyi kolmen ensimmäisen tehtävän perusteella. Arvostelussa otettiin huomioon myös robotin osien hinta.
Perusnavigoinnissa robotti ajoi mutkittelevia, noin 15 metriä pitkiä rivejä pitkin ja kääntyi päisteessä seuraavalle riville. Vaativassa navigoinnissa tehtävä oli muuten sama, mutta riviltä puuttui maisseja ja käännöksissä hypittiin rivien yli järjestäjien antamien ohjeiden mukaisesti. Ohjeet annettiin joukkueille tunti ennen kilpailun alkua.
Rikkakasvien torjunnassa maissirivien väliin oli asetettu keltaisia golfpalloja, jotka matkivat voikukkia. Robotin tehtävänä oli tunnistaa rikka, antaa äänimerkki ja torjua rikka vapaavalintaisella tavalla.
Jos robottia auttoi käsin, kaukosäätimellä tai etäkäyttöliittymän avulla, seurauksena oli viiden metrin sakko. Golfpallojen laskentatarkkuudelle oli selkeä kaava ja viiden hengen tuomaristo antoi jokaisesta osiosta tyylipisteet.
Erittäin haastavan tehtävän tarkoituksena oli tehdä eroa kehittyneempien robottien välille. Pellossa oli jyrkkiä ylä- ja alamäkiä sekä paikoin runsaasti rikkaruohoja. Tähän osioon lähti mukaan vain viisi robottia.
Viimeisessä freestyle-osiossa joukkueet saivat vapaasti esitellä robotin ominaisuuksia.
Suomalainen joukkue on osallistunut kilpailuun aiemmin kolme kertaa: vuosina 2005, 2006 ja 2007.
Tämän vuotisen joukueen muodostivat neljä Teknillisen korkeakoulun automaatiotekniikan opiskelijaa: Juha Backman (kapteeni), Heikki Hyyti, Jouko Kalmari ja Jouko Kinnari (varakapteeni), kaksi TKK:n mekatroniikan opiskelijaa: Antti Hakala ja Vesa Poutiainen sekä kaksi Helsingin yliopiston agroteknogian opiskelijaa: Petro Tamminen ja Heikki Väätäinen.
Joukkuetta ohjasivat tekniikan tohtori Timo Oksanen, maatalous- ja metsätieteiden tohtori Johannes Tiusanen sekä diplomi-insinööri Jari Kostamo.
Robotin suunnittelu ja rakentaminen alkoi syyskuussa 2007. Robottia rakennettiin lukuvuoden ajan projektityökursseina. Robotin nimeksi annettiin Mean Maize Maze Machine eli lyhyesti 4M.
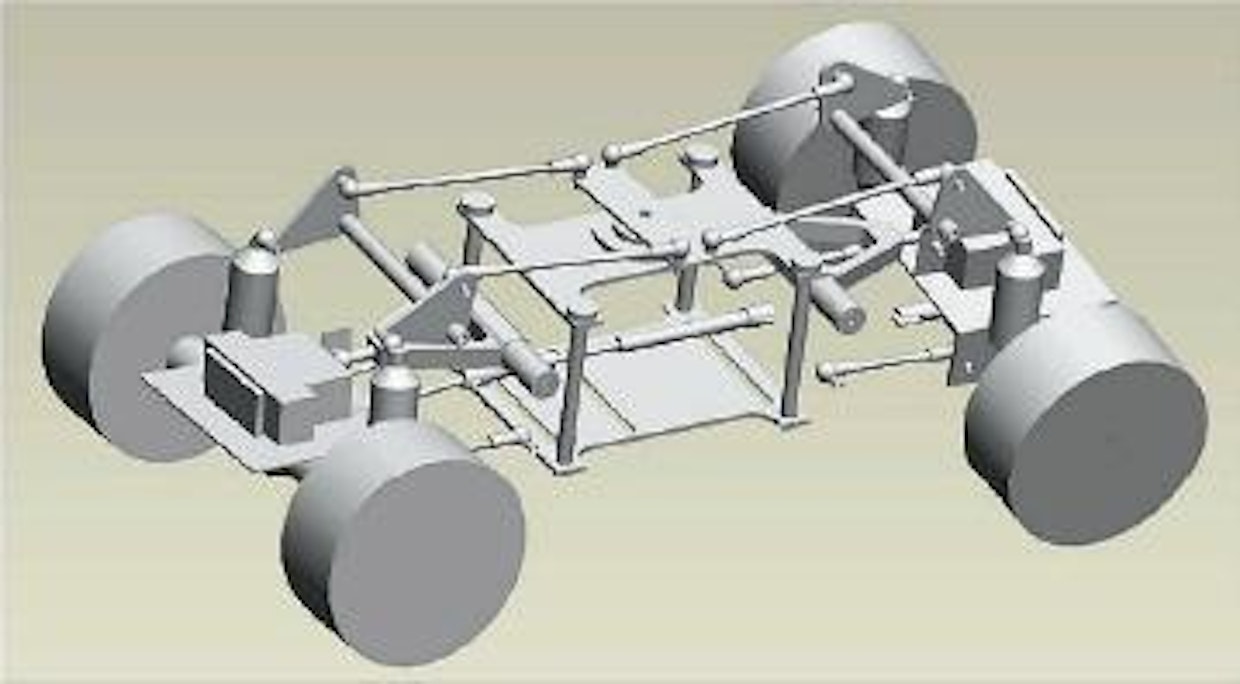
Aikaisempien kilpailujen kokemuksien perusteella asetetut vaatimukset robotille olivat: nelipyöräinen, nelivetoinen, nelipyöräohjattu, kahteen suuntaan ajettava, mahdollisimman symmetrinen ja akseliripustuksissa pitää olla tasapainotusmekanismi. Näiden vaatimusten pohjalta joukkue suunnitteli ja rakensi mekaniikan.
Robotissa käytettiin radio-ohjattavan auton tasauspyörästöä ja vetoakselistoa. Ajomoottori otettiin akkuporakoneesta. Poran moottori osoittautui luotettavimmaksi ja helpoimmaksi korjata. Lisäksi poran moottori maksaa kymmenyksen teollisuuden käyttöön tarkoitetuista komponenteista, joten hinta-laatu-suhde on erinomainen.
Akselit ripustettiin runkoon tasapainotusmekanismin avulla. Ylärunko kallistuu molempien vetoakseleiden mukaan eikä myötäile vain toisen akselin liikkeitä, kuten traktorin runko.
Ylärunko heiluu selvästi vähemmän kuin traktorityyppisellä ratkaisulla, jossa takana on kiinteä akseli ja edessä keinuakseli. Heilunnan minimointi oli tärkeää, koska heilunta vaikuttaa suoraan robotin liikkeitä ohjailevan kameran kuvan laatuun.
Lisäksi akseleissa on jouset ja iskunvaimentimet, joiden tehtävänä on ottaa vastaan nopeat iskut. Robotti painaa 19 kg, joka on hieman enemmän kuin suunniteltu. Robotin huippunopeus on noin 1,5 m/s eli 5,4 km/h.
Robotissa on sähköinen kompassi, kulmanopeusanturi ja 360 astetta kääntyvä web-kamera. Jokaiseen kulmaan on asennettu ultraäänietäisyysanturi. Mittaustietojen luku ja alemman tason nopeussäätö on toteutettu AVR-mikrokontrollereilla, mutta "äly" kulkee kannettavassa tietokoneessa robotin mukana.
Kun robotti ajaa maissiriveillä, kameran lähettämästä kuvasta erotetaan maissinvihreät alueet ja tunnistetaan robotin sijainti suhteessa näihin alueisiin. Sensorifuusion avulla kamerasta saatu tieto yhdistetään ultraäänimittauksiin. Tästä saadaan luotettava arvio robotin sijainnista suhteessa riviin. Arvio välitetään navigointialgoritmille, joka säätää etu- ja takapyörien kulman niin, että robotti pysyy keskellä riviä.
Robotin osien hinnaksi arvioitiin noin 1400 euroa.
Kolme robottia ansaitsee erityistä huomiota: hollantilainen Cratos sekä saksalaiset Helios ja Robin. Niiden esittelyt ovat seuraavalla aukeamalla. Muut kilpailuun osallistuneet robotit olivat tekniikaltaan enemmän tai vähemmän edellisten vuosien kaltaisia.
Suomen joukkue saapui kisapaikalle puolitoista päivää ennen kilpailun alkua. Harjoitukset ovat kilpailun kannalta olennaisia, koska Suomessa ei kesäkuun alussa ole maissipeltoja, joilla robottia voisi testata. Testipäivien ohjelma oli suunniteltu tarkkaan kuukausia etukäteen.
Kilpailun ennakkosuosikki oli saksalainen Helios, joka voitti edellisen kilpailun lähes virheettömällä suorituksella. Nyt robotti oli vielä varustettu 4000 euron laserskannerilla. Saksalaisjoukkueella oli kuitenkin vaikeuksia saada laserskannerin laskentaohjelma toimimaan.
Suomalaisten suoritus testipäivinä oli niin vakuuttava, että tuomaristo rankkasi 4M:n lähtöjärjestyksessä ensimmäiseksi. Arviolta parhaat robotit laitettiin radalle ensimmäisenä, jotta maissipelto säilyisi mahdollisimman ehjänä.
Kilpailu alkoi perjantaina 13. kesäkuuta kello 13.00. Suomen joukkueen robotti asetettiin liikkumaan päisteissä "rapuohjauksella", eli tunnistettuaan rivin viimeisen kasvin robotti kääntää kaikki pyöränsä vinoon ja siirtyy seuraavan rivivälin kohdalle, kamera kääntyy ja matka jatkuu päinvastaiseen suuntaan.
Kapteeni Backman koski robottiin vain kerran suorituksen aikana – silloinkin pellossa olleen virheen takia. Pellon loppuosassa kaksi riviä oli kylvetty ristiin, eikä robotti löytänyt oikeaan paikkaan. 4M sai ensimmäisen osion työskentelystään toiseksi eniten tyylipisteitä, 22/25.
Toisena startannut Helios kulki pellossa hitaammin kuin suomalaisten robotti. Robotti sai tuomaristolta yhtä vaille täydet tyylipisteet, vaikka joukkue auttoi robottia kolme kertaa. 4M voitti osion kuitenkin niukasta, koska seuraavat joukkueet jäivät ajonopeudessa ja luotettavuudessa selvästi jälkeen. Hollantilaisten Robinia vaivasivat akkuongelmat, Cratos puolestaan ei pysynyt rivien välissä hyvästä vauhdistaan huolimatta.
Seuraavassa tehtävässä liikuttiin riveillä, joissa oli aukkoja. Reitti julkistettiin tunti ennen kisaa.
4M tunnisti rivin loput selvästi paremmin kuin muut robotit. Rivien aukot ja vaihteleva maissin pituus aiheuttivat muille roboteille suuria vaikeuksia. 4M sai tuomareilta täydet 25 pistettä. Pääasiassa saksalaisista koostunut yleisö oli mykistynyt. Osiossa oli kolmen minuutin aikaraja, eikä osa roboteista ehtinyt siinä ajassa tekemään kuin pari käännöstä.
Kolmas laji oli rikkojen tuhoaminen. Lajissa tärkeintä oli keltaisten pallojen tunnistaminen. Kaikki olivat toteuttaneet tunnistamisen kameran ja kuvankäsittelyn avulla.
4M erottelee kuvasta vihreän maissin seasta keltaiset pallot. Palloja seurataan niin pitkään kuin ne näkyvät kuvassa. Kun pallo poistuu kuvasta, robotti suihkauttaa palloa hiuslakalla, joka simuloi torjunta-ainetta.
Osioon toi haastetta epävakaa sää. Välillä paistoi aurinko, välillä ei. Värien tunnistuksen hienosäätö nousi ratkaisevaan rooliin.
4M:n tunnistusmenetelmä oli paperilla kaikkein hienostunein, ja osoittautui parhaaksi myös käytännössä. Tuuriakin oli matkassa, sillä 4M:n haravoidessa maissilabyrinttia aurinko oli pilvessä. Jo testit osoittivat, että tunnistus toimii parhaiten pilvisessä säässä. 4M tööttäili löytäessään palloja ja hiuslakkasuihku osui lähes kaikkiin kohteisiin.
Helioksen vuorolla aurinko alkoi paistaa. Kisan jälkeen pidetyssä seminaarissa saksalaiset myönsivät auringon haitanneen heidän suoritustaan. Myös muut robotit löysivät palloja vaihtelevalla menestyksellä. Osakilpailun voitto tuli ylivoimaisesti Suomeen.
Kolmen osakilpailuvoiton myötä myös kokonaiskilpailun voitto oli selvä.
"Erittäin haastava pelto" oli nimensä mukainen. Rataa ei päässyt kokeilemaan etukäteen, eikä harjoituskäyttöön tehty rata muistuttanut lainkaan kilparataa. Pellossa oli paikoittain niin paljon vesiheinää, että maisseja tuskin erotti heinän seasta. Tehtävänä oli laskea pellossa olevien maissintaimien määrä.
Testit osoittivat, että huolellisuus on vaikeilla radoilla tärkeämpää kuin vauhti. 4M:n ajonopeus asetettiin todella alhaiseksi. Taktiikka oli hyvä, sillä nopeammin ajaneet robotit eivät pysyneet rivien välissä, tekivät täyskäännöksiä keskellä riviä ja laskivat maissit epätarkasti. Luotettava laskenta toi 4M:lle osakilpailusta niukan voiton.
Viimeisessä freestyle-osiossa joukkueiden tehtävänä oli esitellä, mitä hyödyllistä tällaiset robotit voisivat pellolla tehdä.
Suomen joukkue oli rakentanut perävaunun, jonka avulla robotti suoritti paikkauskylvöä. Perävaunu on paikkauskylvöä tehtäessä kaksikon älykkäämpi osapuoli. Se tunnistaa omien ja robotilta saatujen tietojen perusteella aukot maissirivissä. Perävaunu ohjaa oman nivelaisansa, vantaansa ja syöttölaitteensa lisäksi robotin ajonopeutta. Tieto siirtyi robotin ja vaunun välillä tietoliikenneväylää pitkin.
Sama tekniikka on ISOBUS:n ansiosta tulossa traktori-työkone-yhdistelmiin. Tulevaisuudessa työkoneen ohjaimesta voidaan komentaa myös traktorin nostolaitetta, voimanottoa ja hydrauliikkaventtiileitä.
Oivaltavan tekniikan ansiosta 4M voitti myös kilpailun viimeisen osion.
Suomen joukkue voitti kilpailussa kaikki mahdolliset palkinnot. Joukkueessa oli hyvä yhteishenki ja lahjakkaat yksilöt hoitivat vastuualueensa hienosti. Kehitystyö ja testaus oli huolellista ja suunnitelmallista, minkä ansiosta projekti pysyi aikataulussa. Myös ohjaajien kilpailukokemus oli joukkueelle eduksi.
Joukkueen kisamatkan mahdollistivat sponsorit: Henry Fordin säätiö, HP Finland, Junkkari ja Koneviesti. Ensi vuonna kilpailu järjestetään Hollannissa. Suomesta on lähdössä mukaan uusi joukkue uuden robotin kanssa. Sponsoreiden etsintä on käynnissä.
Hollantilainen kuusipyöräinen ja 52 kg painoinen Cratos toimii liukuohjauksella. Huomio kiinnittyy massiivisiin ajomoottoreihin. Joka pyörässä on oma napamoottori. Kiinalaiset 24 V:n harjattomat sähkömoottorit on lainattu polkupyörästä. Moottoreissa on integroidut alennusvaihteet. Tehoa jokaisessa pyörässä on 160 W eli yhteensä robotissa on tehoa yhden hevosvoiman verran.
Robotin navigointi perustuu konenäköön ja ultraääniantureihin. Hollantilaiset joutuivat konenäkökirjaston lisenssiongelmien takia ajamaan kisassa pelkästään ultraääniantureiden avulla.
Pyörät ja moottorit vaikuttivat erittäin luotettavilta. Robotin ongelma oli osittain puutteellinen jousitus ja painonjako pyörien kesken. Robotin nappularenkaissa ei ole jousitusta lainkaan.
Viime vuoden voittajassa, saksalaisessa Helioksessa on nelipyöräohjaus, teollisella alennusvaihteistolla varustettu 440 W:n sähkömoottori sekä CNC-koneistetut vetoakselit, vanteet ja muut mekaniikkaosat. Myös muu tekniikka on hienoa: robotissa on 4000 euron arvoinen laseretäisyysskanneri, mini-PC, teollisuuskamera keltaisten pallojen etsintää varten, etäkäytön mahdollisuus PDA:n avulla ja spraypullojärjestelmä rikkojen torjuntaan.
Kokoonpano on hyvin viimeistelty. Käytännössä sama joukkue osallistui kilpailuun jo kolmatta kertaa. Sponsorirahaa joukkueella tuntui riittävän, sillä he ovat rakentaneet robotista kolme identtistä kappaletta.
Saksalaisen Dresdenin yliopiston joukkue on yleensä tuonut kilpailuun mekaanisesti vakuuttavia, mutta "älyllisesti" hieman keskeneräisiä robotteja.
Tällä kertaa Dresdenissä oli rakennettu nelipyöräinen Robin, jonka jokaisessa pyörässä on sähköinen napamoottori ja erilliskääntö. Rakenteen ansiosta robotti pystyy kääntymään paikallaan tai ajamaan kääntymättä mihin tahansa suuntaan.
Robotti kulki vesipumpun bensiinimoottorilla, johon oli yhdistetty moottoripyörän generaattori. Tästä huolimatta robotti painoi vain 25 kg. Robotin painopiste oli alhaalla ja maavaraa oli reilusti.
Narusta käyntiin nykäistävä robotti herätti katsojissa hilpeyttä.