
Apul. prof Lammert Kooistra Wageningenin Yliopistosta valotti Droonit maa- ja metsätaloudessa -tapahtumassa UAV-teknologian tuoreimpia kehitysaskelia. Kuva: Jussi Knaapi







Koneviesti alkoi kartoittaa pienoishelikoptereiden ja -lennokkien tilannetta vuonna 2011, jolloin järjestimme Loimaan Viljelymenetelmäkentällä ensimmäisen lentonäytöksen.
Itse lentotekniikan kehitys on ollut huimaa. Laitteet ovat tulleet helpoiksi käyttää, hintataso on tippunut, tarjonta on runsasta ja lompakon paksuudesta riippuen laitteisiin on asennettavissa monipuolinen valikoima erilaisia kameroita ja sensoritekniikkaa.
Aiheeseen pureuduttiin hiljan ”Droonit maa- ja metsätaloudessa”-seminaarissa. Kaksipäiväiseen kansainväliseen tapahtumaan oli koottu kattavasti alan viimeisin tieto–taito niin Suomesta kuin maailmaltakin. Tämä artikkeli perustuu omiin kokemuksiimme ja kyseisen seminaarin antiin.
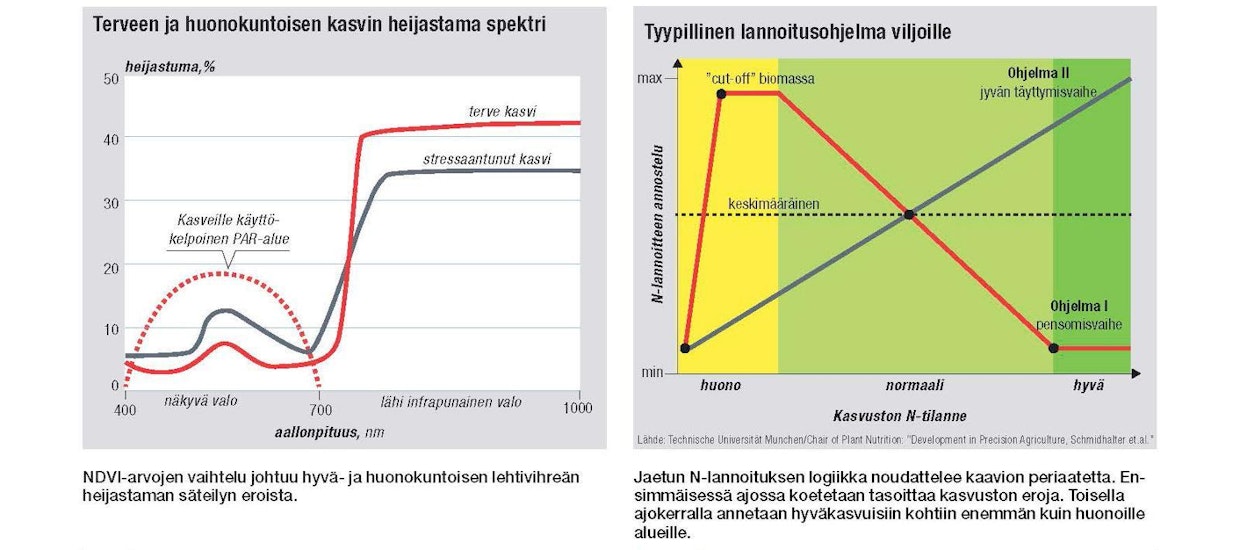
On syytä muistaa, että nykyinen ilmakuvaus ja sen hyödyntäminen kasvuston kunnon arvioinnissa perustuu edelleenkin kasvin lehtivihreän heijastuksen voimakkuuden arviointiin. Poimimalla heijastuvista aallonpituuksista punaisen ja ns. lähipunaisen (NIR) alueen kaista kapeana täsmällisenä piikkinä, saadaan tarkempi signaali lehvästön heijastusvoimakkuudesta. Juuri tuolla lähipunaisella (NIR) alueella heijastuksen ero hyvinvoivan ja stressaantuneen kasvin välillä on selkein.
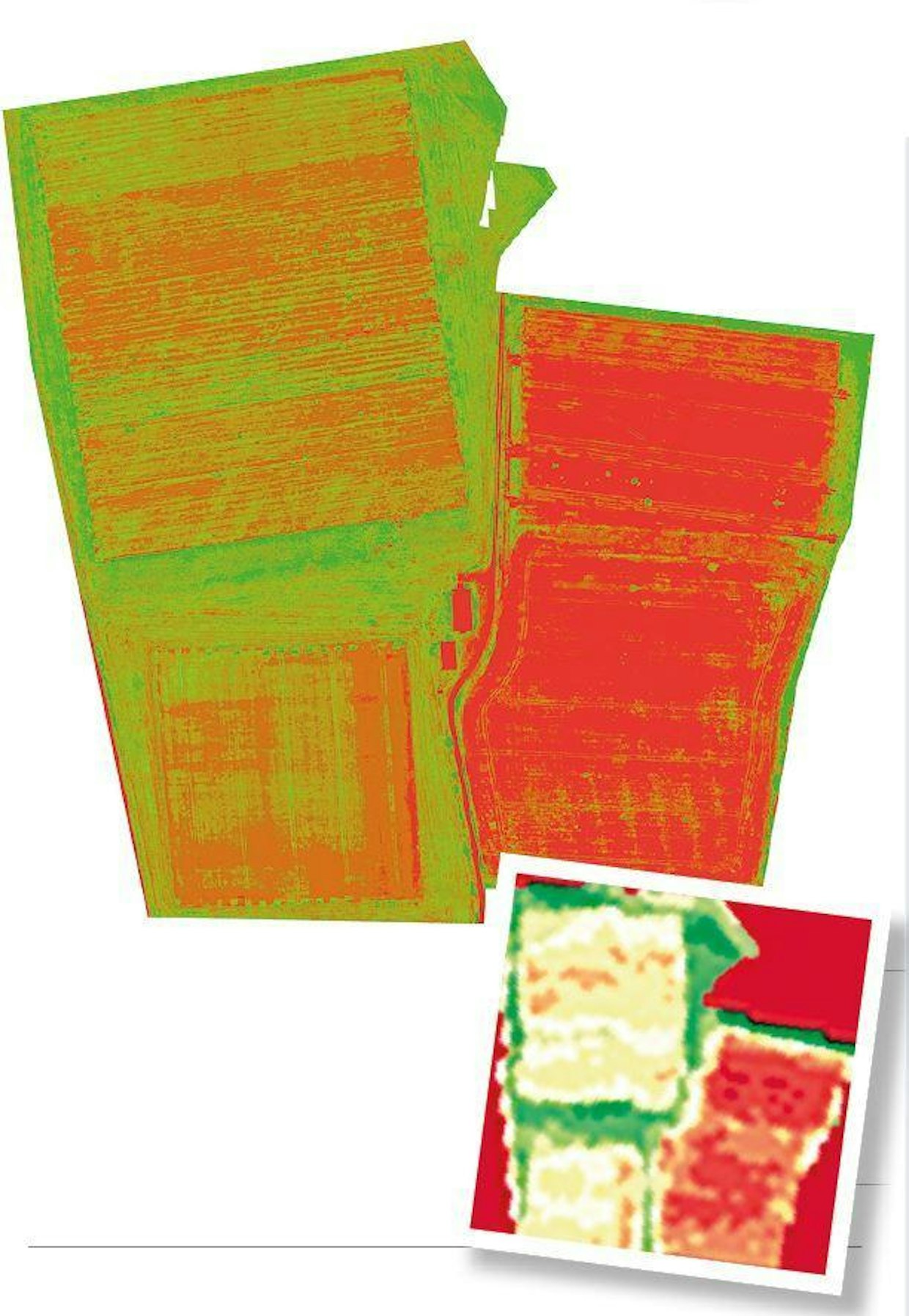
Tähän samaan periaatteeseen perustuvat traktoriin asennettavat kasvustosensorit (N-sensorit), RPAS-laitteiden multispektrikamerat ja myös erilaiset satelliittikuvien palvelut. Traktoriin ja kasvinsuojeluruiskuihin asennettavat kasvustosensorit eivät ole varsinaisia kameroita, vaan kyseisen aallonpituuden aistivia sensoreita. Ne eivät tuota ”oikeaa” valokuvaa, vaan ns. NDVI (NDRE) kartan, jossa peltolohkon vyöhykkeet kyllä kuvantuvat juurikin saman periaatteen mukaisesti kuin multispektrikameroissa ja satelliiteissa.
Ihan tavallinen värikuvakin (RGB- kuva) antaa hyvin samantyyppisen vyöhykekartan kuin erikoiskamerat. Pellon karkea vyöhykejako hyvin ja huonommin kasvaviin alueisiin onnistuu myös tällä tavoin. Erona kalliimpiin multispektrikameroihin onkin hieman suurpiirteisempi tarkkuus ja etenkin kasvukauden edistyessä lehtivihreän erojen heikompi havaittavuus. Etenkin kasvukauden alkupuolella, kun oraiden lomassa on nähtävissä myös paljasta maan pintaa, toimii tavallinen värikamera varsin mallikkaasti. Indeksinä ei välttämättä käytetä perinteistä NDVI:tä, vaan myös toisia (esim. OSAVI) indeksejä, jotka huomioivat heijastuvia aallonpituuksia hieman eri tavoin.
Siinä, missä tavallinen RGB-kamera häviää kuvattavien aallonpituuskaistojen tarkkuudessa, se voittaa perinteisessä tarkkuudessa, eli kuvan resoluutiossa. Tähän tarkkuuteen vaikuttaa suurimmin toki lentokorkeus. Mitä matalammalla lennetään, sen tarkempi on kuva. Tyypillinen 100–150 metrin lentokorkeus antaa yksittäisen kuvapikselin tarkkuudeksi 4–10 cm riippuen siis myös kameratyypistä.
Kun pellolla halutaan jakaa alue kasvuvoimaltaan tai olosuhteiltaan erilaisiin vyöhykkeisiin – hyviin ja huonompiin, niin metsässä tilanne on hieman erilainen. Siellä lentokartoituksella ei niinkään haeta kasvuvoimakkuusvyöhykkeitä, vaan erotellaan puulajeja, poimitaan sairastuneita yksilöitä, määritellään puiden korkeudet ja lopulta saadaan arvio jopa puiden tilavuudesta. Näin päästään käsiksi myös metsän kasvulukuihin.
Ylläkerrotun johdosta metsässä pärjätään varsin pitkälle aivan tavallisella RGB-kameralla, koska varsinaista NDVI-tyyppistä lehtivihreän voimakkuutta mittaavaa indeksiä ei hyödynnetä.
Yksittäisen pellon kuvantaminen tapahtuu nykyään teknisesti hyvin helposti. Lentosuunnitelma tehdään edullisella IoS- tai Android-ohjelmasovellutuksella ja hyödyntäen älylaitteiden (kännykkä tai tabletti) paikannusominaisuutta, sekä (yleensä) googlemaps karttapohjaa.
Lentosuunnitelma ohjaa kameran ottamaan raakakuvia 60–70 prosentin lomituksella, jolloin saavutetaan käytännössä orto-oikaistu tarkka kartta. Kyse on kolmiomittauksen periaatteesta, kun sama maastopiste näkyy useammassa yksittäisessä kuvassa. Mitä tarkempi kartta halutaan, sitä matalammaksi lentokorkeus määritellään. Perusvyöhykekartoituksessa käytettävällä 150 metrin korkeudella saadaan yhdellä (30 min) lennolla katettua 20–30 hehtaarin ala, joka riittää pelto-olosuhteissa oikein hyvin. Jos lentolaitteen akku on käytävä vaihtamassa, laite palaa jatkamaan tehtäväänsä automaattisesti. Pilotin ei enää tarvitse teknisesti hallita lentämisen hienouksia, automatiikka on sitä varten. Ero vanhoihin 1-roottorisiin koptereihin on kuin yöllä ja päivällä.
Eri ajankohtina ja vuosina otetut kuvat antavat yleensä johdonmukaisia vyöhykkeitä, mutta kuvista ei pystytä määrittelemään varsinaisia heijastusarvojen numeerisia voimakkuuksia. Tätä varten eri ajankohtina otetut kuvat on yhdenmukaistettava. Se tapahtuu ottamalla jokaisen kuvaussession aluksi kuva tunnetun heijastusarvon omaavasta kalibraatiolevystä. Kamerapuolelta tuttu termi ”valkotasapainon määritys” kuvaa juuri samaa toimenpidettä.
Huolellisesta valmistautumisesta huolimatta kuvaushetken sääolosuhteet saattavat turmella kuvien laatua. Riskejä ovat pilvisyys ja väärä kuvausajankohta. Onkin pyrittävä kuvaamaan keskipäivällä, jolloin varjot eivät ole vielä harmina. Kirkas sää yhdistettynä jatkuvasti vaihtelevaan pilvisyyteen sekoittaa todennäköisesti kuvien prosessoinnin. Tuloksena saadaan vyöhykkeitä, jotka aiheutuvat pilvisyydestä, ei kasvuston eroista. Ongelmaa on pyritty lieventämään asentamalla kamerajärjestelmään auringon säteilyvoimakkuutta aistiva sensori, joka ohjaa prosessia. Se auttaa, mutta ei kokonaan poista pilvisyyden ongelmaa.
Sama pilvisyyden ongelma koskee myös satelliittikuvia. Työkoneisiin asennettavat kasvustosensorit ovat tässä suhteessa parempia, koska niissä on nykyään oma valolähde, joka tasaa valaistuserot ja mahdollistaa ajon myös hämärässä ja jopa pimeässä.
Kolmas karttojen käytettävyyteen vaikuttava tekijä on niiden prosessointi. Se voidaan tehdä joko omilla erityisohjelmilla, kuten Pix4D tai MosaicMill. Kyseiset erityisohjelmat ovat yksittäiskäyttäjälle kalliita, joten hyvä vaihtoehto onkin käyttää verkon kautta saatavia palveluja. Esimerkkeinä amerikkalainen Drone deploy, saksalainen Farmblick tai ruotsalainen Solvi.
Eri prosessointipalvelujen testausta ei kukaan liene ennättänyt tehdä, enemmänkin on kerrattu itse koptereiden ominaisuuksia. Tärkeintä onkin käyttää samaa palvelun tarjoajaa tai ohjelmaa, jotta tulokset pysyisivät vertailukelpoisina. Toki perus NDVI-karttojen vyöhykejako tulee kaikilla ratkaisuilla varsin hyvin hoidetuksi.
Eri ajankohtien kuvannusten koordinaatit voivat heittää jonkin verran, koska perusdroneissa ei käytetä RTK-tarkennusta – ollaan standardi GPS- ja Glonass-signaalien varassa. Aika hyvin kartat osuvat kohdilleen näinkin, mutta senttitarkkuutta ei saavuteta. Sama ”ongelma” koskee myös älykännykköjen ja vastaavien paikannusta. Tilanne on kuitenkin paranemaan päin, sillä erilaisia RTK-ratkaisuja on jo markkinoilla. Niitä esiteltiin myös Naantalin Drooni-seminaarissa (ks. lisämateriaali). Kun karttojen tarkkuus paranee senttitasolle, avautuu aivan uusia mahdollisuuksia. Voidaan esimerkiksi määrittää lehtivihreän voimakkuuden lisäksi kasvustojen volyymi, eli korkeus ja sitä kautta päästään tarkennettuun kasvunopeuden tarkasteluun. Metsässä voidaan vastaavasti tarkentaa puuston havainnointia.
Edellä on kerrottu miten erilaisia kasvustoindeksejä saadaan karttapohjille muodostumaan. Kaikki on tältä osin kunnossa, mutta sen sijaan prosessi ja analysointi tästä eteenpäin on hatarammalla pohjalla – Mitä oikein mittaamme ja kuinka kertynyttä dataa pitäisi hyödyntää?
Kaikki kasvustoindeksit pohjautuvat auringon (tai keinovalon) säteilyn aiheuttamaan heijastukseen, jonka lähipunaisen (NIR) arvon muutokset kertovat siis lehtivihreän kunnosta ja voimakkuudesta. Tämä asia on perinteisesti liitetty melko suoraan kasvin typen saantiin. Tällä taktiikalla onkin päästy melko pitkälle, sillä typpi on niin määräävä tekijä kasvin kehityksessä.
Tämä ei kuitenkaan ole ainoa tekijä, joka vaikuttaa lehtivihreän heijastusarvoihin. Jo pelkistä ravinteista on helppo poimia vaikka magnesium (Mg) tai rikki (S), jotka vaikuttavat myös lehtivihreän voimakkuuteen. Listaa voisikin jatkaa monilla tärkeillä stressitekijöillä, kuten esimerkiksi maaperän ominaisuudet, kovuus tai kosteus jne.
Eli tulosten tulkinnassa oleellisen tärkeä lenkki onkin saada aina ns. referenssinäytteet, joista mitaten vasta voidaan hahmottaa syiden ja seurausten todellista tilannetta.
Sensoritekniikka kehittyy koko ajan. Koneviestissäkin on aiemmin esitelty ns. hyperspektrikameroiden tekniikkaa. Niillä voidaan poimia kasvien heijastusspektristä hyvin kapeita ja halutusta kohtaa tallennetavia kaistoja. Tältä alueelta on vielä löydettävissä aallonpituuksia, jotka voivat antaa lisää ennustettavuutta esimerkiksi tietyille kasvitautiriskeille. Aihe on vaativa, mutta oletamme kehityksen kehittyvän tässäkin kohdin. Kun opitaan poimimaan vain halutut aallonpituudet, tulee myös niiden vaatima kameratekniikka halventumaan.
Joskus ratkaisu saattaa löytyä yllättävän yksinkertaisestakin kohdin. Naantalin konferenssissa Roope Näsi esitteli Luken ja Geologisen laitoksen (DroneFinland.fi) laajaa koetta, jossa yhtenä esimerkkinä oli oikean rehunkorjuun ajankohdan ennustaminen. Työkaluna käytettiin rehun D-arvon laskentamallia. Huolimatta hyvin kattavasta sensoritekniikan repertuaarista, saatiin paras ennustettavuus (korjuuajankohdalle) käyttämällä vain yhtä heijastusarvon aallonpituutta, eli veden haihtumista kuvaavaa noin 950 nm aluetta. Eli lyhyesti ilmaisten, pelkästään rehun kuivumista seuraten pystyttiin parhaiten ennustamaan oikea korjuun ajankohta!
Sensoritekniikan seuraavia portaita ovat edullisemmat lämpökamerat ja yhdistelmäkamerat, jotka tallentavat samalla kertaa sekä RGB, multispektri- ja myös lämpökamera-aineiston. Tällainenkin uutuus on jo tulossa markkinoille.
Unohtaa ei sovi myöskään lasersädepohjaista Lidar-tekniikkaa. Se on vielä varsin arvokasta, mutta tarjoaa etenkin metsäsovellutuksissa mahdollisuuden mitata runkojen ominaisuuksia ilman että runsaskaan lehvästö haittaa mittausta.
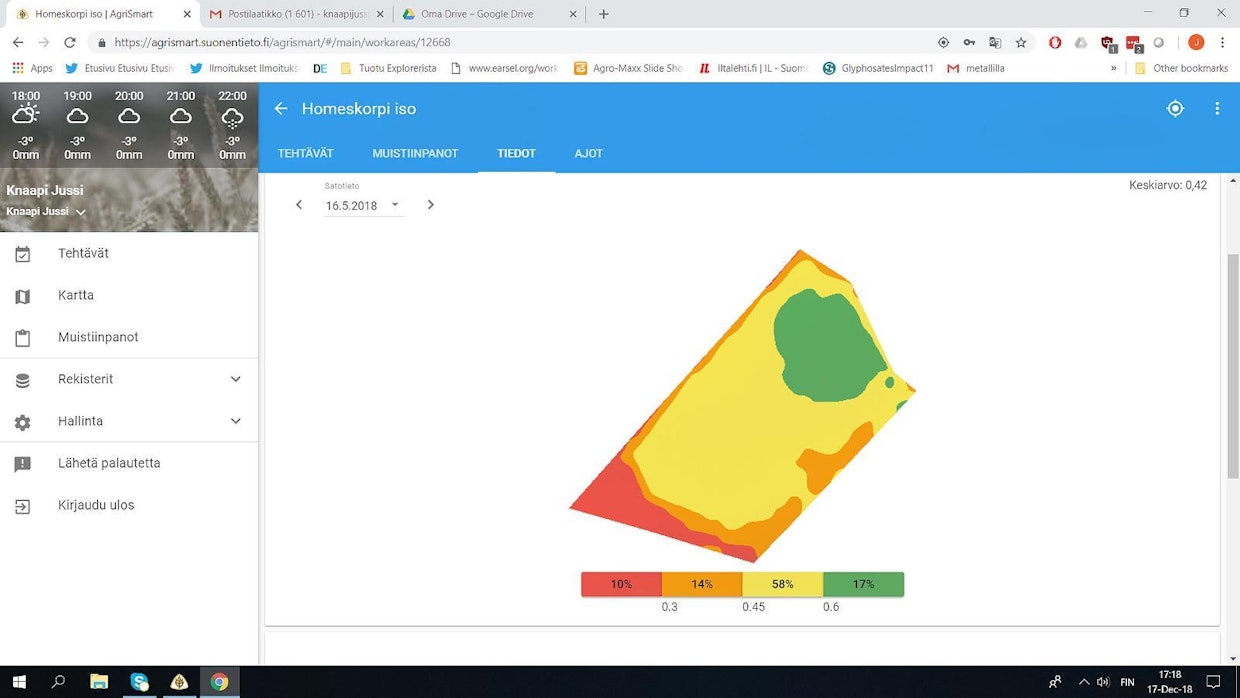
Karttuvan ilmakuvausmateriaalin hyödyntämien edellyttää toimivaa datan prosessointia ja sen yhdistämistä referenssitietoon ja tietenkin myös viljelijän omiin muistiinpanoihin.
Maatalousohjelmien tekijät ovat vastaamassa haasteeseen. Alalle on syntynyt lukuisia tuoreita ohjelmayrityksiä, joista monet ovat tutkimuslaitosten ja yliopistojen ”spin-offeja” eli yritykset on perustettu hyödyntäen perustutkimuksessa saatuja tuloksia, ja yrittäjät ovat joko tutkijoita tai hyvin tiiviissä yhteistyössä heidän kanssaan. Haaste perinteisten maatalousohjelmien tekijöille on kova.
Suomea koskien tilanne on erityisen haasteellinen. Markkinat tämäntyyppiselle tarkennetun viljelyn – voidaan puhua myös ”Smart Farmingista” tai ”Täsmäviljelystä” – ohjelmistoille ovat vasta kehittymässä ja traktoriautomaation puolella on jo tarjolla täsmäviljelyn tekniikkaan suunniteltuja ns. FMIS-ohjelmia. Ne ovat ulkolaista alkuperää ja niiden soveltaminen meidän VISU- ja lohkokorttien ympäristöön on toistaiseksi tekemättä.
Euroopassa markkinoille on jo tullut myös täydellisiä, kaiken tilatoiminnan sisältäviä ohjelmia, joiden myötä rimaa on edelleen korotettu.
Hyvä uutinen on, että myös suomalaiset ohjelmatalot ovat töitä tehneet ja kehitystä on syntynyt. Tahti maailmalla on kuitenkin niin kova, että näkisimme mieluusti erilaisia yhteistyökuvioita muodostuvan. Kysymyshän on lopulta melko yksinkertaisista asioista – että ohjelmat pystyvät lukemaan samaa kerättyä tietoa ja hyödyntämään saatuja tuloksia.…
Lue artikkeli peltojen ilmakartoituksesta KV 1/2019!
